Map to Map: From SLAM to CAD Maps and Back Using Generative Models
Abstract
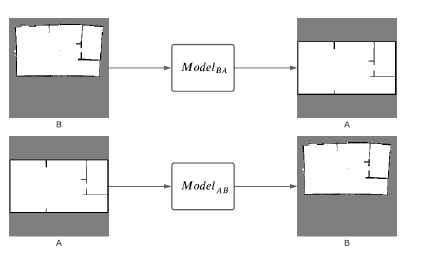
In Simultaneous Localization and Mapping (SLAM), good quality maps could play an important role beyond the implicit benefits they have to the localization problem. For example, good quality SLAM maps could be used as `pre-maps' for generating maps with a higher semantic meaning and geometric structure, such as in 2D CAD maps in which doors, windows, and other entities carry meaning. Unfortunately, in its raw form, the quality of a SLAM map one can obtain is limited by several factors, some due to software and others due to hardware. This paper proposes to address this problem by converting raw SLAM maps to CAD maps based on a generative adversarial network. The paper also investigates the inverse problem, that of generating SLAM maps from 2D CAD drawings. We do so by investigating two approaches, one based on an analytical model, the other on a generative adversarial network. Experiments demonstrate both qualitatively and quantitatively the success of the proposed approaches.