Biography
I am currently pursuing a MSc in Robotics at the University of Michigan. I have also joined the CURLY Lab as a graduate student research assistant under the guidance of Prof. Maani Ghaffari. Throughout my undergraduate career at the American University of Beirut, I developed a deep and passionate interest in the field of Robotics and Control Systems. My knowledge in this field is always expanding, whether by working on several projects or by working on my research topics. I am always looking for ways to increase my knowledge in Robotics and hopefully implement it for good use in this world.
Interests
- Control Systems
- SLAM
- Optimization
Education
MS Mechatronics, Robotics and Automation, 2023
University of Michigan
BE in Mechanical Engineering, 2020
American University of Beirut
Experience
Graduate Student Research Assistant at the CURLY Lab
University of Michigan
Teaching and Research Assistant in the Vision and Robotics Lab
American University of Beirut
Supervisor and Designer in the Control Unit of the ME Department
Dar Al-Handasah Shair and Partners
Trainee at the ME Department
Dar Al-Handasah Shair and Partners

Projects
A showcase of my major projects




Recent Lectures, Talks and Presentations
Featured Publications
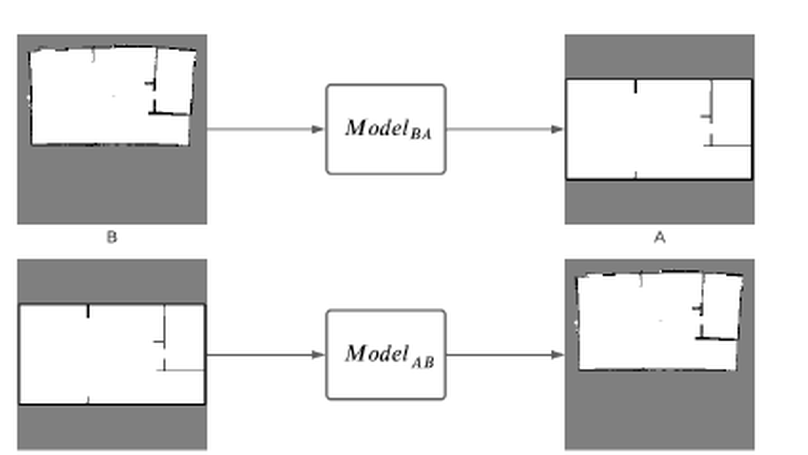
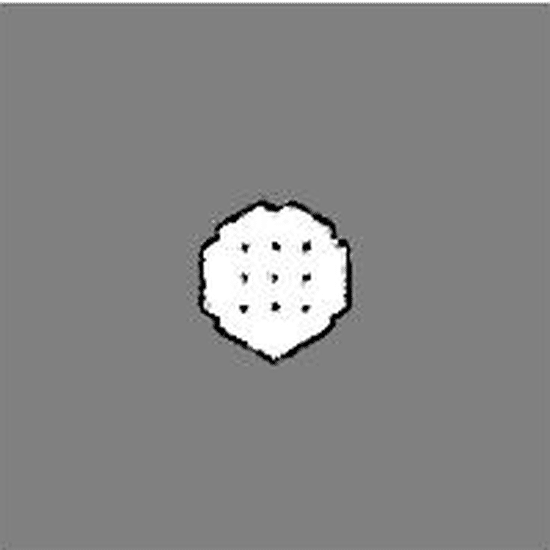
Map to Map: From SLAM to CAD Maps and Back Using Generative Models
In Simultaneous Localization and Mapping (SLAM), good quality maps could play an important role beyond the implicit benefits they have to the localization problem. For example, good quality SLAM maps could be used as `pre-maps' for generating maps with a higher semantic meaning and geometric structure, such as in 2D CAD maps in which doors, windows, and other entities carry meaning. Unfortunately, in its raw form, the quality of a SLAM map one can obtain is limited by several factors, some due to software and others due to hardware. This paper proposes to address this problem by converting raw SLAM maps to CAD maps based on a generative adversarial network. The paper also investigates the inverse problem, that of generating SLAM maps from 2D CAD drawings. We do so by investigating two approaches, one based on an analytical model, the other on a generative adversarial network. Experiments demonstrate both qualitatively and quantitatively the success of the proposed approaches.

A Novel Method For Map Alignment Assessment Using Synthetic Displacement Fields
In the era of autonomous robot mapping, assessing the goodness of the generated maps is important, and is usually performed by first aligning them to blueprints and then calculating the displacement error. Accuracy of map alignment is also critical in other applications such as collaborative mapping in multi-robot applications and the use of prior maps in real time robot localization and navigation. However, map alignment is difficult for two reasons: first, one map can be significantly distorted from the other, and second, establishing what constitutes a ground truth for alignments of different types is challenging. Most map alignment techniques to this date have addressed the first problem, while paying too little importance to the second. In this paper, we propose a ground truth, which consists of synthetically transformed maps with their corresponding displacement fields. Furthermore, we propose a new system for comparison, where the displacement field of any map alignment technique can be computed and compared to the ground truth using statistical measures. The local information in displacement fields renders the evaluation system applicable to any alignment technique, whether it is linear or not. In our experiments, the proposed method was applied to different alignment techniques from the literature.
Recent Papers
Convex Optimization for Wheeled Autonomous Mobile Robots Motion Planning Applications

Map to Map: From SLAM to CAD Maps and Back Using Generative Models

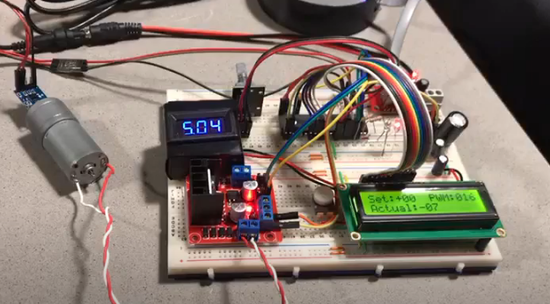
Adaptive Control of a 2-DOF Helicopter


