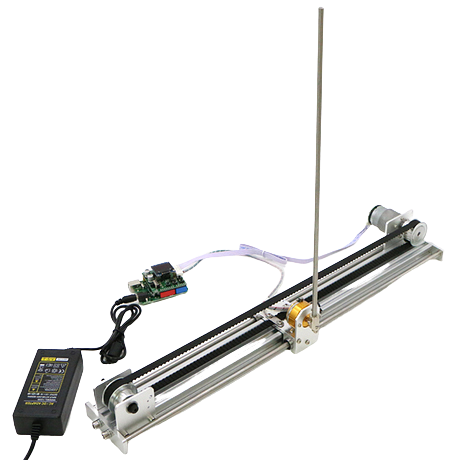
This was the final project of my Control systems course at the American University of Beirut. The project is based on a simple control apparatus which is the inverted pendulum. The Inverted pendulum setup is composed of a motor connected to a belt and a pendulum rotating through the axis of the motor with a potentiometer. The position of the cart is measured using the optical encode coupled to the motor and used as reference to its motion. In order to achieve the project statement which is stabilizing the pendulum in a vertical position, we used a PID controller in order to have a zero steady state error alongside with higher stability and to avoid having oscillations.