Control of a Teleoperation System
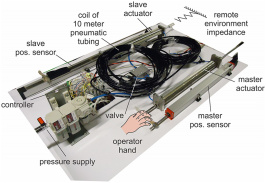
Modeling, control and analysis of a self-tuning regulator for a pneumatic tele-operation system. This system is intended to be used under MRI (Magnetic Resonance Imaging) conditions. In this project proposal, we derive a model for the system, and we propose control specifications and methods for it. This project is based on previous work cited in the report. The controller implemented is an LQR.