1-DOF Gimbal
Final project of the mechatronic course I took at the American University of Beirut.
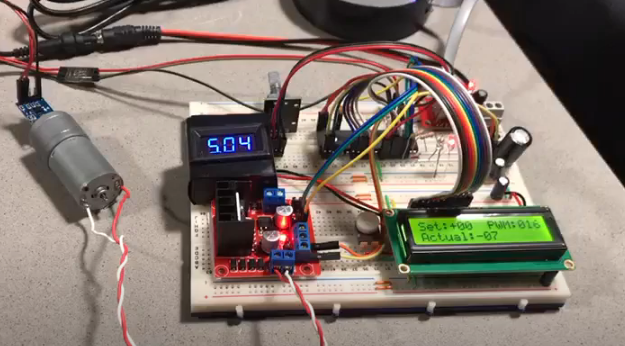
DC motor based one axis gimbal, feedback will be from an ADXL335 analog accelerometer sensor. The controller implemented is a basic tuned PID. The microcontroller used is a PIC18F4550 under MPLAB IDE and coded with C.